
El procesamiento de imágenes de radar de apertura sintética (SAR) es una tarea técnicamente compleja que implica la transformación de datos crudos en productos utilizables para aplicaciones específicas, incluyendo sistemas avanzados de inteligencia artificial (IA). Debido a la naturaleza de las imágenes SAR, que se forman a partir de señales de radar reflejadas, el procesamiento debe abordar desafíos como el ruido, las distorsiones geométricas y la interpretación polarimétrica. A continuación, detallamos los pasos técnicos más importantes en el procesamiento de imágenes SAR y su relevancia para aplicaciones específicas.
Conversión de datos crudos a imágenes de radar
El procesamiento de imágenes SAR comienza con la conversión de los datos crudos de las señales de radar en imágenes interpretables. Este proceso es fundamental para preservar las características geométricas y de amplitud de la superficie observada. La técnica de enfoque SAR implica una reconstrucción que simula una “apertura” larga virtual, combinando los retornos de radar desde diversas posiciones del satélite durante su trayectoria. Para lograr esto, se utilizan algoritmos avanzados como la correlación y la Transformada Rápida de Fourier (FFT), que son esenciales para obtener imágenes de alta resolución.
Uno de los métodos clave es el Backprojection, que reconstruye las imágenes SAR al proyectar los datos de eco sobre una rejilla de píxeles, permitiendo visualizar la información de manera clara. Por otro lado, el Algoritmo Range-Doppler se utiliza para diferenciar los objetos en la dirección lateral, aprovechando la frecuencia Doppler. La Fast Fourier Transform (FFT) transforma las señales en el dominio de la frecuencia, lo que facilita una reconstrucción eficiente y rápida de las imágenes.
Corrección geométrica
La corrección geométrica en el procesamiento de imágenes SAR es fundamental para abordar las distorsiones inherentes a esta tecnología. Las imágenes SAR pueden presentar alteraciones en el rango y azimut, lo que les impide tener una proyección precisa como las imágenes ópticas tradicionales. Este proceso busca transformar las imágenes SAR a un sistema de coordenadas geográficas estándar, como WGS84.
Filtrado y reducción de ruido
El filtrado y reducción de ruido en imágenes SAR es crucial debido a la presencia de speckle, un tipo de ruido que afecta la calidad visual y la claridad de los datos. Este ruido surge de la interferencia coherente entre las ondas de radar reflejadas desde diversas superficies dentro de un solo píxel, lo que dificulta la identificación de detalles importantes.
Para mitigar el speckle sin comprometer los detalles esenciales, se emplean técnicas de filtrado avanzadas. Entre las más comunes está el filtro de Lee, que suaviza las áreas homogéneas al calcular la varianza dentro de una ventana local. Otro método es el filtro de Frost, que es adaptativo y ajusta su comportamiento según el contenido local, preservando los bordes mientras reduce el ruido en regiones uniformes. El filtro Gamma MAP también es popular por su capacidad de optimizar la relación señal-ruido y mantener el contraste en las estructuras clave de la imagen.
Esta etapa es crucial para aplicaciones de detección automática de objetos o patrones, donde una interpretación precisa de las intensidades relativas es importante para los algoritmos de IA.
Corrección radiométrica
La corrección radiométrica es esencial para mejorar la precisión en la interpretación de las imágenes SAR, ya que la intensidad de los ecos de radar puede variar debido a factores como la geometría del terreno o el ángulo de incidencia del radar. Esta corrección asegura que los valores de reflectividad sean consistentes en toda la imagen, lo que es crucial para aplicaciones como la detección automática de objetos.
Dos ajustes clave son la corrección de la atenuación atmosférica, que compensa los efectos de la atmósfera (como la absorción y dispersión de las señales SAR), y la corrección de la incidencia angular, que normaliza las variaciones de intensidad causadas por el ángulo de inclinación del radar con respecto al terreno. Esto garantiza una interpretación precisa de las intensidades, lo cual es fundamental para los algoritmos de IA que dependen de una lectura exacta de los datos radiométricos en la imagen.
Descomposición polarimétrica
El radar puede transmitir y recibir ondas en diferentes polarizaciones (HH, HV, VH, VV). La descomposición polarimétrica permite aprovechar la información adicional obtenida al transmitir y recibir señales en diferentes polarizaciones. Este proceso analiza las diferentes respuestas de las superficies u objetos en la imagen para extraer detalles valiosos sobre su estructura y propiedades.
Entre los métodos más utilizados se encuentra la descomposición de Freeman-Durden, que divide la señal en tres componentes clave: dispersión volumétrica, dispersión simple y dispersión doble, ayudando a caracterizar de manera más precisa la superficie observada. Por otro lado, la descomposición de Cloude-Pottier, que utiliza matrices de coherencia, permite clasificar los tipos de dispersión en la escena, proporcionando información detallada sobre la naturaleza de los objetos y materiales presentes.
Este tipo de análisis polarimétrico es fundamental para aplicaciones como la clasificación de tipos de suelo o vegetación, la identificación de cuerpos de agua o infraestructuras artificiales, y para aplicaciones de seguridad y defensa, como la detección de objetos o actividades inusuales en escenarios complejos.
Interferometría SAR
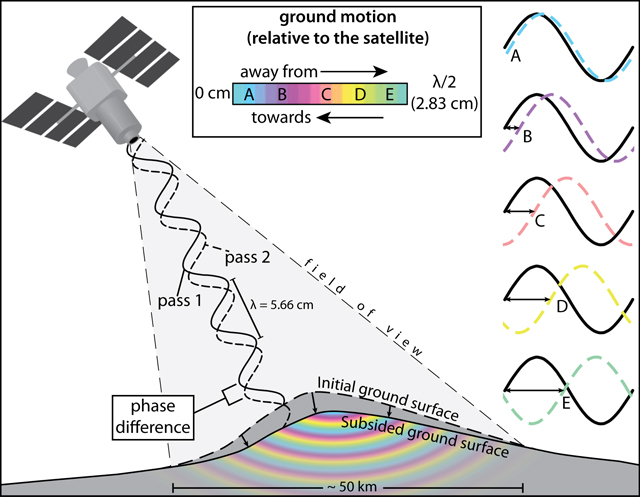
La interferometría SAR (InSAR) es una técnica avanzada que mide pequeños desplazamientos en la superficie terrestre mediante la comparación de la fase de las señales de radar capturadas en diferentes momentos. La clave de InSAR es generar un interferograma que refleje estas diferencias de fase entre dos imágenes SAR. El procesamiento efectivo requiere corregir errores atmosféricos utilizando modelos específicos y técnicas de postprocesamiento. Luego, el algoritmo de Phase Unwrapping o desenvolvimiento de fase traduce esas diferencias en desplazamientos cuantificables, permitiendo obtener datos sobre deformaciones milimétricas.
Fusión multisensor
La fusión multisensor combina imágenes SAR con otras fuentes de datos, como imágenes ópticas o hiperespectrales, para mejorar la precisión y la riqueza de la información obtenida. Este proceso implica técnicas avanzadas de alineación y registro para asegurar que los datos de diferentes sensores estén perfectamente sincronizados y alineados.
El proceso de fusión puede realizarse en varios niveles. A nivel de píxel, se combinan directamente las señales capturadas por diferentes sensores en cada píxel, proporcionando una imagen enriquecida con detalles complementarios. A nivel de características, se extraen atributos clave de cada imagen, como texturas o bordes, y luego se fusionan para mejorar la identificación de objetos o patrones. Finalmente, en la fusión a nivel de decisiones, se integran los resultados de diferentes algoritmos que analizan las imágenes por separado, combinando sus conclusiones para obtener una visión más completa.
La fusión multisensorial es crucial en sistemas de IA, ya que permite aprovechar lo mejor de diferentes fuentes de datos. Este enfoque mejora la robustez y la precisión de los modelos, especialmente en escenarios multiespectrales o con condiciones de visibilidad variables.
Deja una respuesta