

La detección de objetos en imágenes de remote sensing es un campo fascinante que combina la tecnología de imágenes satelitales con el poder de las redes neuronales profundas. Este capítulo nos lleva a través de los desafíos y las soluciones innovadoras que han surgido en este ámbito, destacando la importancia de las CNN y sus diversas arquitecturas.
1. Introducción a la Detección de Objetos
La detección de objetos se define como la tarea de identificar y localizar instancias de objetos dentro de una imagen. En el contexto del remote sensing, esto se complica debido a factores como la variación de escala, la orientación de los objetos y la densidad de instancias. A diferencia de las imágenes naturales, donde los objetos suelen estar bien definidos y separados, en las imágenes de remote sensing, los objetos pueden aparecer en diferentes orientaciones y estar muy juntos.
2. Desafíos en la Detección de Objetos
Los principales desafíos en la detección de objetos en imágenes de remote sensing incluyen:
Variación de Escala: Los objetos pueden aparecer en diferentes tamaños debido a la distancia del sensor. Para abordar esto, se utilizan técnicas como la Feature Pyramid Network (FPN) y la Image Pyramid, que permiten la fusión de características a diferentes resoluciones.
Variación de Orientación: Las CNN tradicionales no son robustas ante variaciones en la orientación. Se han desarrollado redes como las Spatial Transformer Networks (STN) para modelar transformaciones geométricas y mejorar la detección.
Instancias Densamente Empacadas: La proximidad de los objetos puede dificultar su identificación. Se requieren algoritmos que puedan manejar múltiples instancias en un área pequeña.
3. Modelos de Redes Neuronales Convolucionales (CNN)
Los modelos de detección de objetos son el corazón de las arquitecturas de redes neuronales y son responsables de la identificación y localización de objetos en imágenes, algunos enfoques son:
R-CNN: Introducido por Girshick et al. en 2014, R-CNN fue uno de los primeros modelos en aplicar CNN a la detección de objetos. Este modelo utiliza un enfoque de dos etapas, donde primero se generan propuestas de región utilizando la técnica de búsqueda selectiva. Estas propuestas son áreas de la imagen que probablemente contienen objetos. Luego, cada propuesta se recorta y se alimenta a una CNN para extraer características.
Una de las principales innovaciones de R-CNN es el uso de un clasificador SVM para identificar las categorías de los objetos en las propuestas. Sin embargo, R-CNN tiene desventajas, como la redundancia en el cálculo de características y la incapacidad de ser entrenado de manera end-to-end, lo que limita su eficiencia.
Fast R-CNN: Para abordar las limitaciones de R-CNN, Girshick presentó Fast R-CNN en 2015. Este modelo mejora la eficiencia al compartir la computación entre diferentes propuestas de región. En lugar de procesar cada propuesta de forma independiente, Fast R-CNN extrae características de un mapa de características generado por la CNN y utiliza la operación de RoI pooling para obtener características de tamaño fijo para cada propuesta.
Fast R-CNN es significativamente más rápido que R-CNN, logrando una mejora en la velocidad de prueba de 213 veces. Además, permite el entrenamiento end-to-end, lo que significa que todas las partes del modelo se pueden optimizar simultáneamente, mejorando la precisión general.
Faster R-CNN: Faster R-CNN, introducido por Ren et al. en 2017, lleva la idea de Fast R-CNN un paso más allá al introducir la Region Proposal Network (RPN). La RPN es una red completamente convolucional que genera propuestas de región de manera eficiente, eliminando la necesidad de técnicas de propuesta de región manuales. La RPN aprende a predecir la «objetividad» de las instancias y acumula propuestas que se utilizan en la etapa de detección.
Este modelo permite un entrenamiento end-to-end de la RPN y el detector, lo que mejora la precisión y la velocidad. Faster R-CNN ha demostrado ser uno de los modelos más efectivos para la detección de objetos en diversas aplicaciones, incluidas las imágenes de remote sensing.
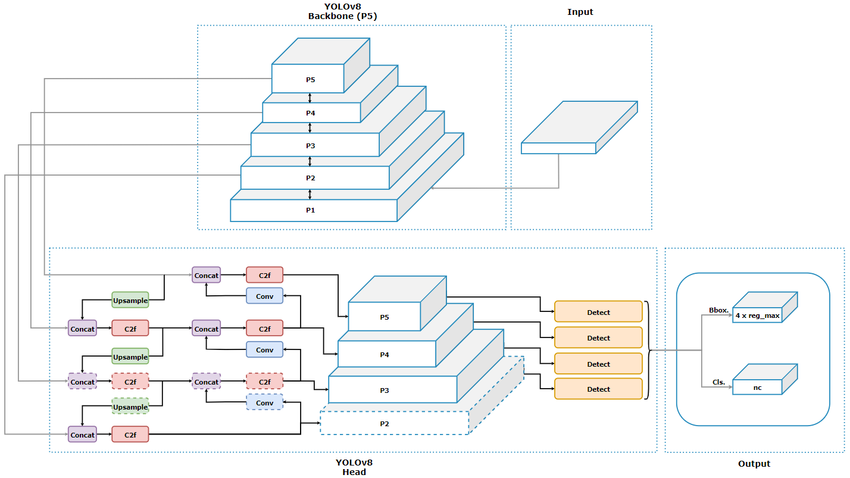
YOLO (You Only Look Once): YOLO es otro modelo de un solo paso que ha revolucionado la detección de objetos. A diferencia de otros modelos que utilizan propuestas de región, YOLO trata la detección como un problema de regresión, prediciendo directamente las cajas delimitadoras y las probabilidades de clase a partir de la imagen completa. Esta aproximación permite que YOLO sea extremadamente rápido, lo que lo hace ideal para aplicaciones en tiempo real.
Las versiones más recientes de YOLO han mejorado la precisión y la capacidad de detección, abordando algunos de los problemas de localización que se presentaban en versiones anteriores. YOLO es especialmente útil en la detección de objetos en imágenes de remote sensing, donde la velocidad y la precisión son cruciales.
4. Arquitecturas y Herramientas
Las arquitecturas de redes neuronales convolucionales (CNN) son fundamentales para el avance de la detección de objetos en imágenes de remote sensing. Estas arquitecturas no solo definen cómo se procesan las imágenes, sino que también influyen en la precisión y eficiencia de la detección. A continuación, se describen algunas de las arquitecturas más relevantes en este campo.:
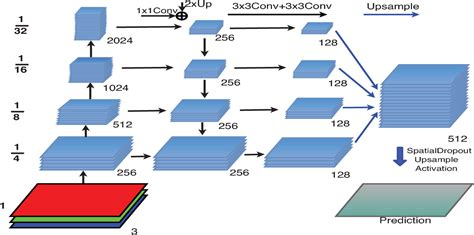
Feature Pyramid Networks (FPN): Las FPN son una arquitectura innovadora que aborda el problema de la variación de escala en la detección de objetos. La idea principal detrás de FPN es crear una pirámide de características que permita la detección de objetos en múltiples escalas. Esto se logra mediante la fusión de características de diferentes niveles de la red, donde las capas más profundas capturan información semántica rica, mientras que las capas más superficiales retienen detalles espaciales finos.
La arquitectura FPN utiliza conexiones laterales para combinar características de diferentes niveles. Por ejemplo, las características de una capa profunda se combinan con las de una capa superficial a través de una operación de suma, seguida de convoluciones para reducir la dimensionalidad. Este enfoque permite que la red sea más robusta ante variaciones de escala, mejorando la detección de objetos pequeños y grandes en la misma imagen.
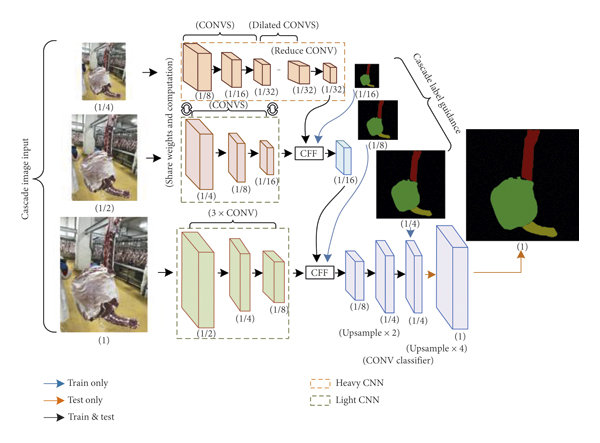
- Image Cascade Network (ICN): La ICN es otra arquitectura que combina la idea de FPN con la imagen piramidal, pero con un enfoque en la eficiencia computacional. La ICN utiliza un algoritmo de cascada de imágenes que permite calcular rápidamente características robustas a escala. Esto se logra mediante el uso de convoluciones con núcleos multiescala, lo que permite a la red extraer características relevantes sin la necesidad de un procesamiento intensivo.
La ICN es especialmente útil en aplicaciones de remote sensing donde el tiempo de procesamiento es crítico, como en la vigilancia en tiempo real o en la respuesta a desastres. Al optimizar la forma en que se extraen y combinan las características, la ICN logra un equilibrio entre precisión y velocidad, lo que la convierte en una opción atractiva para la detección de objetos en imágenes de remote sensing.
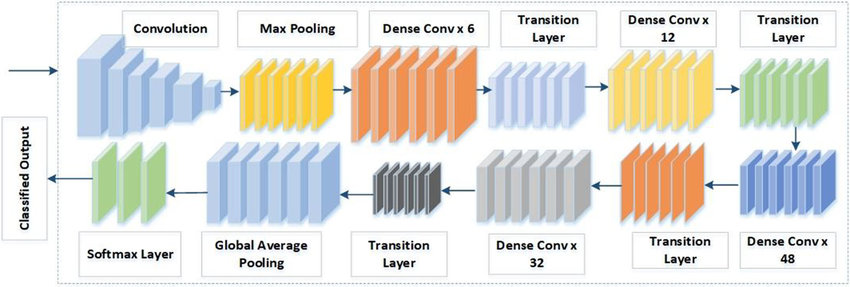
- Densely Connected Networks: Las redes densamente conectadas, como DenseNet, han demostrado ser efectivas en la detección de objetos al permitir una reutilización más eficiente de las características. En lugar de que cada capa aprenda características de manera independiente, las capas en una red densa están conectadas entre sí, lo que permite que cada capa reciba información de todas las capas anteriores. Esto no solo mejora la precisión, sino que también reduce el número de parámetros necesarios, lo que puede ser beneficioso en términos de eficiencia computacional.
En el contexto de la remote sensing, las redes densamente conectadas pueden ayudar a mejorar la detección de objetos en imágenes complejas, donde los objetos pueden estar parcialmente ocultos o superpuestos. Al permitir que la red acceda a una mayor cantidad de información, se pueden obtener características más ricas y representativas, lo que resulta en una mejor identificación y localización de objetos.
- Arquitecturas de Un Solo Paso: Las arquitecturas de un solo paso, como YOLO (You Only Look Once) y SSD (Single Shot MultiBox Detector), han ganado popularidad debido a su velocidad y eficiencia. Estas arquitecturas eliminan la necesidad de una fase de propuesta de región, lo que permite realizar la detección en una sola pasada a través de la red. Esto es especialmente útil en aplicaciones donde el tiempo es un factor crítico, como en la vigilancia y el monitoreo ambiental.
YOLO, por ejemplo, divide la imagen en una cuadrícula y predice las cajas delimitadoras y las probabilidades de clase para cada celda de la cuadrícula. Esta aproximación permite una detección rápida y eficiente, aunque a veces puede comprometer la precisión en comparación con los enfoques de dos etapas. Sin embargo, las mejoras continuas en las versiones de YOLO han cerrado esta brecha, haciendo que estas arquitecturas sean cada vez más competitivas en términos de precisión.
5. Aplicaciones de la Detección de Objetos
Las aplicaciones de la detección de objetos en remote sensing son vastas y variadas y van desde el Monitoreo Ambiental para detectar cambios en el uso del suelo, la deforestación y la urbanización, Seguridad y Vigilancia ayudando en la identificación de vehículos y personas en áreas específicas puede ser crucial para la seguridad pública, pasando por la Gestión de Recursos Naturales facilitando la detección de cultivos y la evaluación de la salud de las plantas, hasta la Respuestas a Desastres en situaciones de emergencia, proporcionando una herramienta para la detección rápida de daños en infraestructuras, que puede ser vital para la planificación de la respuesta.
Deja una respuesta