

La detección de estelas de barcos es especialmente interesante debido a los desafíos que plantea la identificación de embarcaciones que apagan sus sistemas de identificación. Tradicionalmente, se han utilizado imágenes ópticas y de radar para localizar barcos, pero estos métodos encuentran dificultades cuando se trata de barcos pequeños o estructuras que pueden confundirse con objetos naturales como icebergs.
Los principales desafíos en la detección de estelas de barcos se centran en la confusión con otras estructuras lineales del entorno marino y en la falta de datos de calidad. La escasez de conjuntos de datos etiquetados limita el entrenamiento de modelos avanzados de aprendizaje profundo, reduciendo la precisión y robustez de las detecciones. Además, en las imágenes de radar (SAR) y ópticas, las características de las estelas pueden confundirse fácilmente con otras formaciones naturales, como olas marinas, vertidos o residuos flotantes, lo que complica la identificación precisa.
Se han desarrollado algoritmos basados en aprendizaje profundo que utilizan enfoques de detección en «dos pasos», que primero identifican posibles regiones de estelas y luego las refinan, y enfoques de «un solo paso», que son más rápidos y eficientes al detectar y clasificar las estelas directamente. Estas detecciones pueden ser especialmente útiles para operaciones de control de tráfico marítimo y de defensa nacional; las estelas, que pueden extenderse varios kilómetros, proporcionan un rastro detectable a pesar de la falta de señales directas del barco.
Entrada y salidas del modelo
El modelo para la detección de entradas emplea imágenes ópticas VHR (Very High Resolution) y HR para detectar la estela de Kelvin, el principal componente de las estelas y que se corresponde con la característica forma de «V», junto a la estela turbulenta, que conforma la línea generada por las hélices de los barcos. Para ello se emplea un enfoque de «un solo paso» basado en redes convolucionales (CNN), que demuestra un comportamiento favorable incluso en imágenes de menor resolución que las empleadas en su entrenamiento.
La salida del modelo proporciona en SEDA unas líneas sobre la estela de Kelvin (en verde) junto a la estela turbulenta (en rojo) que convergen sobre la posición del barco que la origina, como se puede ver en la Figura 1 y 2.
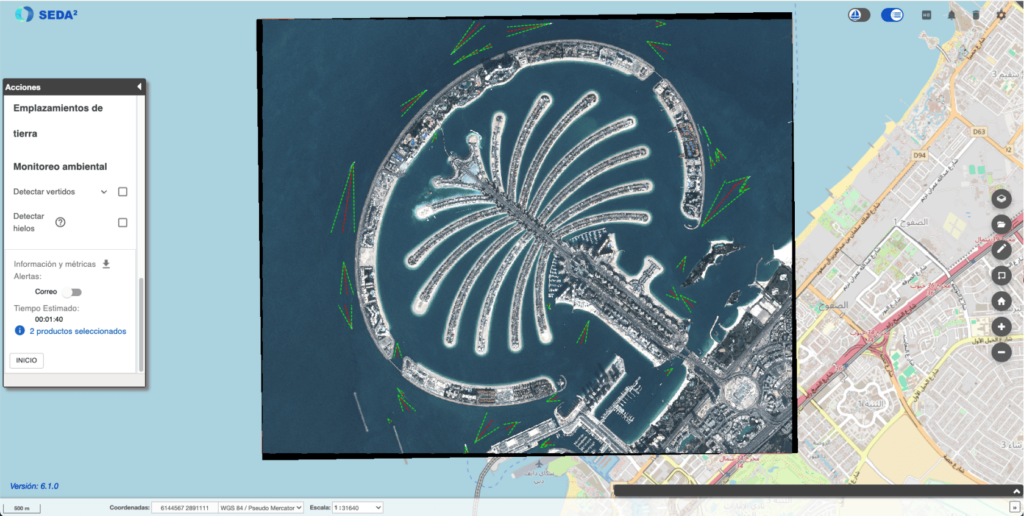

La Figura 1 es un buen ejemplo de cómo la estela de las embarcaciones es de un tamaño mucho superior al de la embarcación, permitiendo en determinadas condiciones detectar navíos que podrían no ser identificados con un modelo de detección. En la Figura 2 se muestra en más detalle algunas de estas detecciones, donde el modelo es capaz de identificar las trazas de la estela de Kelvin y la estela turbulenta incluso cuando estas se solapan al proceder de barcos cercanos.
Como resultado, SEDA ofrece la posibilidad de descargar informes en formatos personalizados como PowerPoint, o informes en formatos estandarizados como KML, NVG o Shapefile. Además, también se ofrece la posibilidad de obtener informes en formatos OTAN como ISRSREP y RECCEXREP o la imagen analizada en formato NSIF.
Aplicaciones
La detección tanto de embarcaciones como de su estela proporcionadas por SEDA son de especial utilidad en contextos de seguridad y vigilancia marítima, donde se permite un mayor nivel de control sobre las embarcaciones que buscan permanecer ocultas. También en ámbitos de operaciones navales y de rescate y salvamento, donde una rápida detección de embarcaciones en amplias zonas de búsqueda pueden ser cruciales para garantizar la seguridad de los navegantes.